अर्ध-स्वचालित प्यानल बेन्डर EMBC 1402
उत्पादन विशिष्टता
| छैन। | नाम | प्यारामिटर | एकाइ |
| 1 | अधिकतम लम्बाइ | १४०० | mm |
| 2 | अधिकतम चौडाइ | १४०० | mm |
| 3 | न्यूनतमझुकाउने लम्बाइ | २०० | mm |
| 4 | न्यूनतम झुकाउने चौडाइ | 260 | mm |
| 5 | अधिकतम झुकाउने मोटाई (MS,UTS410N/mm²) | 1 | mm |
| 6 | Min.bending मोटाई (MS,UTS410N/mm²) | ०.५ | mm |
| 7 | अधिकतम झुकाउने उचाइ | १७० | mm |
| 8 | माथिल्लो प्रेस म्यानुअलको लम्बाइ समायोजन मोड | ||
| 9 | औसत ऊर्जा खपत | २.२ | KW |
| 10 | वजन | 15 | T |
विशेषता र मुख्य संरचना
मेसिन डिजाइन र निर्माण को मामला मा, Hebei Hanzhi CNC मेसिनरी कं, लि।मुख्यतया निम्न बिन्दुहरूमा केन्द्रित छ:
1. व्यावहारिकता पछ्याउने र प्रयोगकर्ताको हरेक पैसा बचत गर्ने मार्केटिङ अवधारणा।
2. एक धेरै भरपर्दो र सटीक डिजाइन अवधारणा।
3. उच्च गुणस्तरको कच्चा माल, खरिद गरिएका भागहरू र उत्कृष्ट प्रशोधन प्रविधिहरू।
4. प्रयोगको सहजता र मर्मत र सुरक्षामा थप जोड।
5. एउटै उद्योगमा कम मर्मत दर र मर्मत लागत।
फ्रेम
A. एक 3D सीमित तत्व मोडेल निर्माण गर्दै: विकसित र डिजाइन गरिएको 3D ठोस मोडेलमा आधारित, एक गतिशील परिमित तत्व मोडेल गणनाको लागि बनाइएको छ।मोडेल बल स्थानान्तरण जडान मा मुख्य घटक विचार गर्दछ।बलहरू जडानको माध्यमबाट असरमा स्थानान्तरण गरिन्छ र त्यसपछि असरको बल विश्लेषण गरिन्छ।
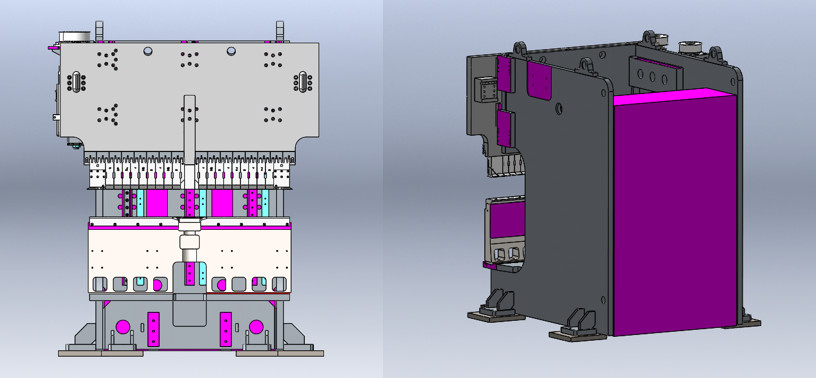
चित्र १ पूर्ण मेसिनको प्यानल बेन्डर फिनाइट एलिमेन्ट डायनामिक मोडलिङ
B. स्थिर विश्लेषण परिणामहरूको विश्लेषण: ढिलो मेसिनिंग गतिको कारण, बल विश्लेषणलाई स्थिर समस्यामा कम गर्न सकिन्छ।प्लेट कम्प्रेसन लोड र कटर टाउकोको ठाडो दिशामा झुकाउने भारको आधारमा, तनाव र विरूपण परिणामहरू तल देखाइएको छ।अधिकतम तनाव 21.2mpa को अधिकतम तनाव संग शरीर को घाँटी मा देखिन्छ र अधिकतम विरूपण 0.30mm को अधिकतम विकृति संग शरीर को माथिल्लो छेउ मा देखिन्छ।
फ्रेम को परिमित तत्व विश्लेषण परिणाम अनुसार, Q345 इस्पात सामग्री को रूप मा छनोट गरिएको थियो;कार्बन डाइअक्साइड ढाल वेल्डिंग अपनाईएको थियो;वेल्डिंग द्वारा उत्पन्न तनाव हटाउन टेम्परिंग उपचार गरिएको थियो;यसरी दीर्घकालीन सञ्चालनको लागि उपकरणको शुद्धता, स्थिरता र उच्च कठोरता सुनिश्चित गर्दै।
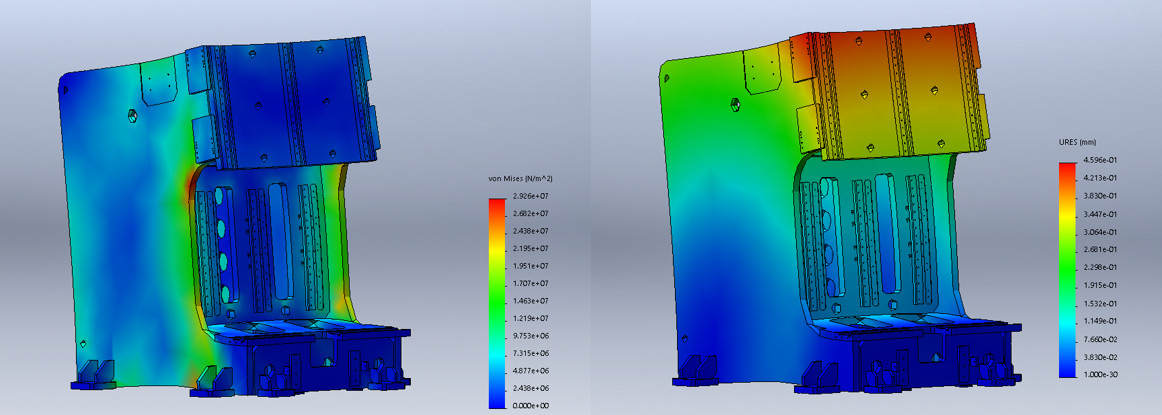
चित्र 2 फ्रेमको तनाव विस्थापन विरूपण विश्लेषण परिणामहरू
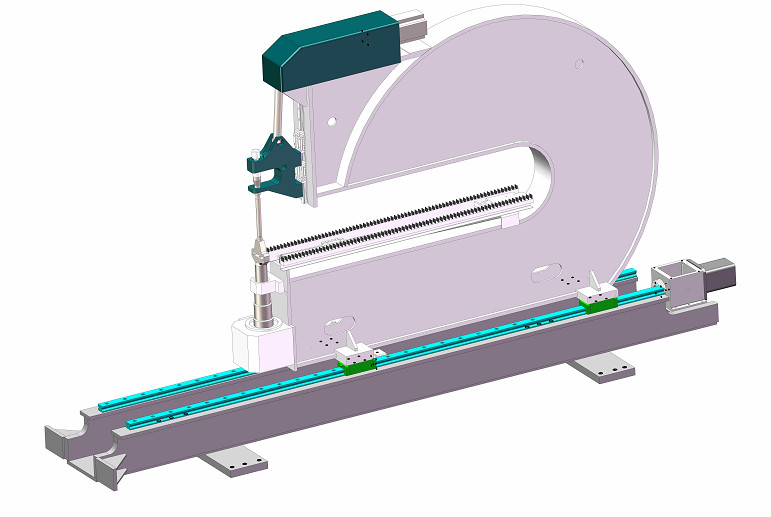
माथिल्लो भेडा
यो भागमा मुख्यतया स्लाइडर, उच्च टोक़ लिड स्क्रू, रिड्यूसर, गाईड रेल, सर्वो मोटर र यस्तै हुन्छ।मुख्य ड्राइभ सर्वो मोटर द्वारा नियन्त्रित छ र नियन्त्रण मोड सर्वो सिंक्रोनस नियन्त्रण हो, जसले प्रभावकारी रूपमा स्थिति सटीकता, छिटो गति र उच्च नियन्त्रण योग्यता सुनिश्चित गर्न सक्छ।लीड स्क्रू र गाइड रेलको स्नेहनले स्वचालित स्नेहन अपनाउछ, र ग्रीस 00 # हो, जसले लामो समय सञ्चालनको लागि नेतृत्व स्क्रू र गाइड रेलको सेवा जीवन र सटीकता सुनिश्चित गर्दछ।
माथिल्लो स्लाइडरको स्थिर विश्लेषण परिणामहरू: माथिल्लो तालिकाको तनाव विस्थापन मृगौला रेखाचित्रले देखाउँछ कि अधिकतम तनाव माथिल्लो भागमा देखिन्छ, अधिकतम तनाव 152mpa हो, अधिकतम विरूपण माथिल्लो तालिकाको माथिल्लो छेउमा देखिन्छ, अधिकतम विरूपण 0.15mm छ
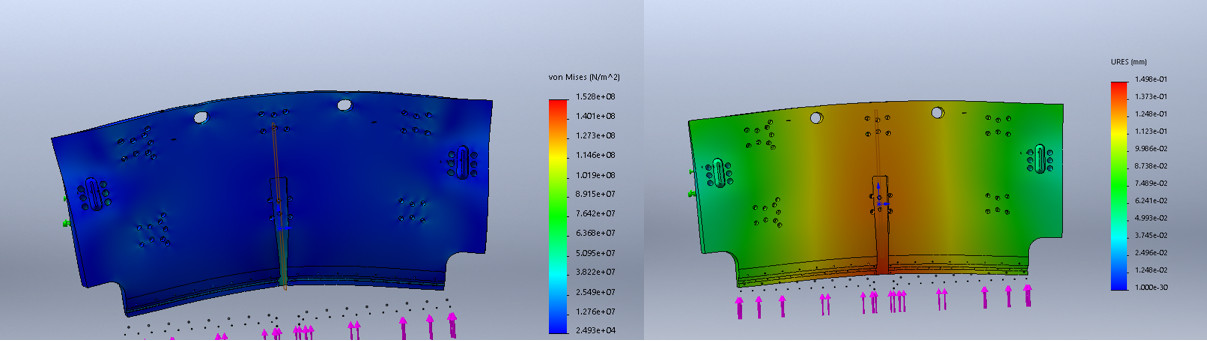
चित्र 3 र्यामको तनाव विस्थापन विश्लेषण परिणामहरू
राम को परिमित तत्व विश्लेषण परिणाम अनुसार, Q345 इस्पात सामग्री को रूप मा चयन गरिएको थियो;CO2 ढाल वेल्डिंग प्रयोग गरिएको थियो;टेम्परिङ उपचार वेल्डिंग द्वारा उत्पन्न तनाव हटाउन को लागी गरिएको थियो;यसरी दीर्घकालीन सञ्चालनको लागि उपकरणको शुद्धता, स्थिरता र उच्च कठोरता सुनिश्चित गर्दै।
झुकाउने एकाइ
झुकाउने एकाइको पावर ड्राइभ भाग हाइड्रोलिक प्रणालीको संलग्नता बिना सर्वो मोटरद्वारा संचालित हुन्छ, जसमा कम्पोनेन्टहरूको पहिरन र आँसु कम गर्ने र प्रसारण दक्षताको सन्दर्भमा ठूलो फाइदाहरू छन्, ऊर्जा बचत र वातावरण संरक्षण नीतिको वकालतको अनुरूप। राज्य द्वारा।
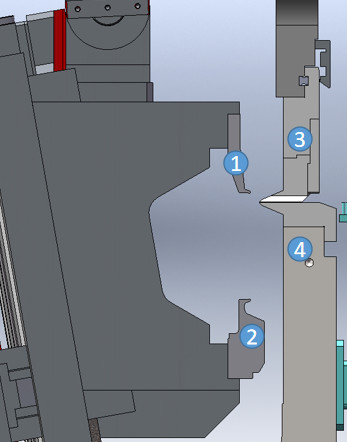
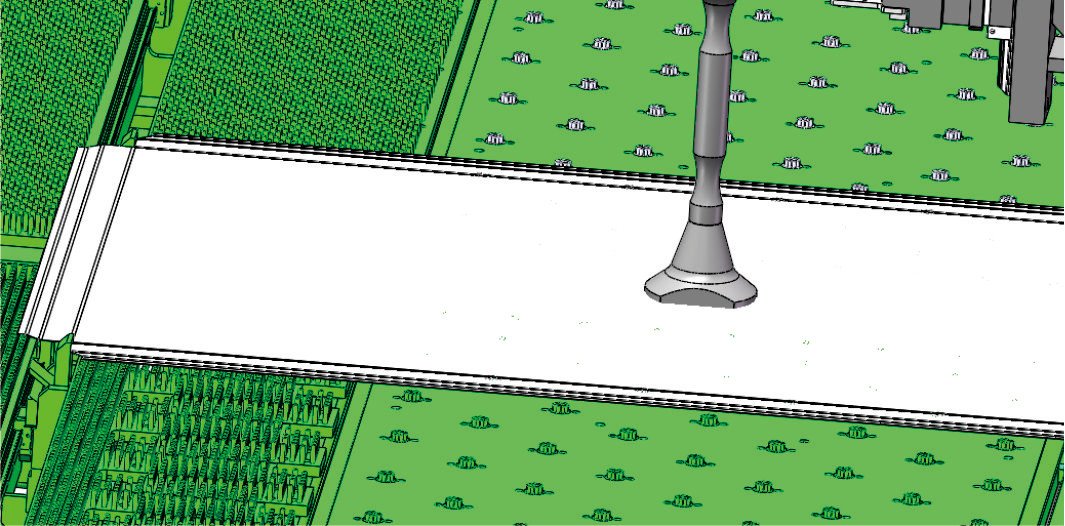
पाना जानकारीको सेटिङ अनुसार, प्रणालीले स्वचालित रूपमा माथिल्लो प्रेस चक्कु 3 को स्थिति गणना गर्दछ र पाना ठीक गर्न माथिल्लो प्रेस चक्कु 3 र तल्लो प्रेस चक्कु 4 बीचको दूरी नियन्त्रण गर्दछ;प्रणाली सेटिङ अनुसार, यो झुकाउने माथि वा तल होस्, तल्लो प्रेस चक्कु 2 वा माथिल्लो प्रेस चक्कु 1 छिटो झुकाउने स्थितिमा सार्न नियन्त्रण गरिन्छ;विभिन्न सेटिङ कोणहरू अनुसार, झुकाउने चक्कुलाई बेन्डिङ पूरा गर्न पेटेन्ट गरिएको कोण गणना सूत्र मार्फत गणना गरिएको स्थितिमा सार्न नियन्त्रण गरिन्छ।
झुकाउने विभिन्न तरिकाहरू अनुसार, कोण झुकाउने, ठूलो चाप झुकाउने, सपाट झुकाउने, इत्यादिमा विभाजन गर्न सकिन्छ, कुन कोण झुकाउनेलाई माथिल्लो झुकाउने र तलको झुकावमा विभाजन गरिएको छ।
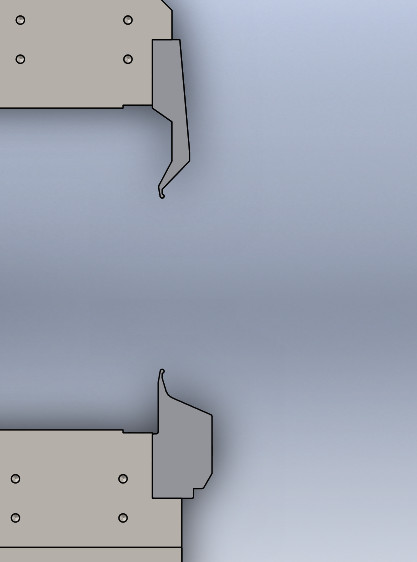
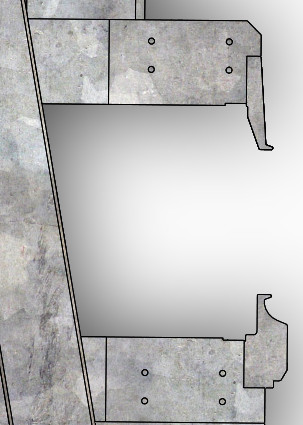
माथिल्लो प्रेस इकाई
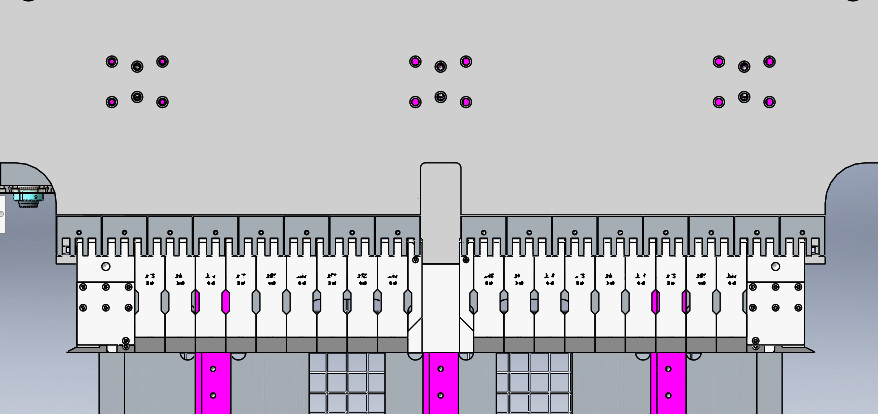
Fig.6 माथिल्लो प्रेस एकाइ
माथिल्लो प्रेस एकाइ: सबै झुकाउने प्रक्रियाहरूको एक भाग, EmbC पूर्ण सर्वो बहुपक्षीय झुकाउने केन्द्र एक विशेष माथिल्लो प्रेस एकाइसँग सुसज्जित छ जुन विभिन्न प्लेट लम्बाइहरूको लागि स्थापना र म्यानुअल रूपमा समायोजन गर्न सकिन्छ।
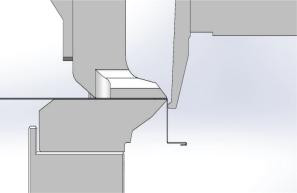
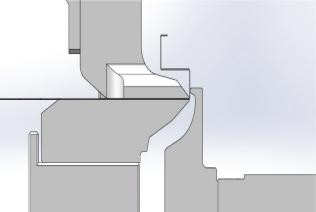
परित्याग झुकाउने बक्सको आवश्यकताहरू पूरा गर्न, हामीले एक विशेष परित्याग डाई विकास गरेका छौं।थिच्नु अघि, रेखाचित्रमा थिच्नु अघि टाँसिएको डाइको एक भाग राज्यमा हुन्छ र फिडिङ सुरु हुन्छ।खुवाउने पछि, यो रेखाचित्रमा थिचेपछि र झुकाउन सुरु हुन्छ।झुक्नु पछि, माथिल्लो स्लाइडर सर्छ।माथिल्लो स्लाइडरको आन्दोलनको क्रममा, भाग A थिच्नु अघि स्वचालित रूपमा राज्यमा सर्नेछ।माथिल्लो स्लाइडर सेट स्थितिमा सारियो पछि, अर्को आन्दोलन सुरु हुन्छ।
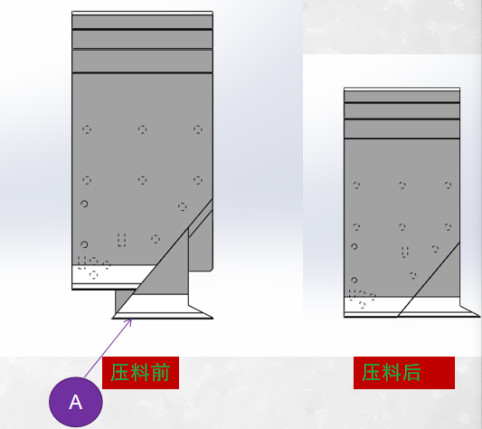
Fig.7 झुकाउने बक्स परित्याग
उपकरण
झुकाउने उपकरणहरू माथिल्लो झुकाउने उपकरणहरू र तल्लो झुकाउने उपकरणहरूमा विभाजित छन्।विशेष झुकाउने उपकरणहरू ग्राहकको विभिन्न आवश्यकताहरू अनुसार अनुकूलित गर्न सकिन्छ।
2. प्लेट खुवाउने एकाइ:
पाना धातुको चाल, क्ल्याम्पिङ र रोटेशन क्रमशः रोबोट 1, फिक्स्चर 2 र घुमाउने डिस्क 3 द्वारा नियन्त्रण गरिन्छ।सम्पूर्ण मेसिनिङ प्रक्रियाको बखत, शीट मेटलको फिडिङ सर्वो मोटरहरूद्वारा नियन्त्रित हुन्छ, स्वचालन र छिटो स्थिति सक्षम पार्दै, आन्दोलनको समय घटाउँछ र दक्षता बढाउँछ।संरचनात्मक आविष्कारहरू र पूर्ण सर्वो नियन्त्रणको आवेदनको लागि धन्यवाद, पाना धातुको क्ल्याम्पिङ र रोटेशनले बहुपक्षीय झुकाउने केन्द्रको कार्य प्रक्रियामा शुद्धता कायम राख्न सक्षम छ।धेरै जटिल workpieces को लागी, बहुभुज को लागी, 0.001 को एक निरन्तर रोटेशन सटीकता को ग्यारेन्टी गर्न सकिन्छ।
3. प्लेट स्थिति एकाइ:
प्लेट पोजिसनिङ एकाइमा बायाँ स्थिति पिन, दायाँ स्थिति पिन, अगाडि स्थिति पिन र पछाडि स्थिति पिन समावेश छ;बायाँ र दायाँ स्थिति पिनले प्लेटलाई बायाँ र दायाँ तिर राख्छ।अगाडिको स्थिति पिन र पछाडिको स्थिति पिनले प्लेटको अगाडि र पछाडिको स्थितिलाई नियन्त्रण गर्दछ र प्लेट माथिल्लो र तल्लो प्रेस चक्कुहरूसँग समानान्तर छ भनेर सुनिश्चित गर्दछ, जुन प्लेटको स्थिति सटीकता सुनिश्चित गर्न प्रयोग गरिन्छ।
प्लेट पोजिशनिङ एकाइले स्वचालित रूपमा प्लेटलाई स्थितिमा राख्न सक्छ र स्वचालित रूपमा बहुपक्षीय झुकाउन एक पटकमा पूरा गर्न सक्छ, जसले झुकाउने चक्र समयलाई धेरै छोटो बनाउँछ, पहिलो झुक्दा प्लेटको कपाल त्रुटि नियन्त्रण गर्दछ र झुकाउने शुद्धता सुनिश्चित गर्दछ।
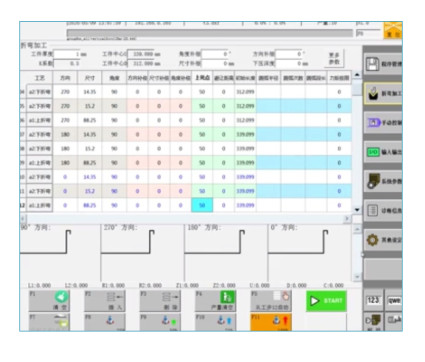
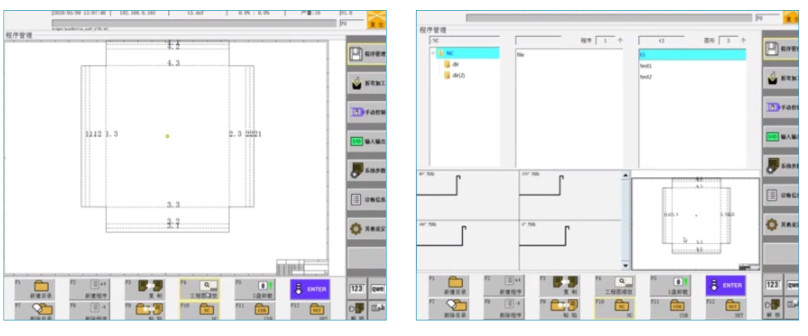
4.CNC प्रणाली
A: संयुक्त रूपमा विकसित सीएनसी प्रणाली र सफ्टवेयर लागू गर्न सकिन्छ र छिटो र सजिलै व्यवस्थित गर्न सकिन्छ
B: मुख्य सुविधाहरू।
क)।उच्च हस्तक्षेप प्रतिरोध संग EtherCAT बस नियन्त्रण विधि
ख) प्रत्यक्ष प्रोग्रामिङलाई समर्थन गर्दछ, प्रत्येक चरणको लागि झुकाउने डाटा फारममा प्रविष्ट गर्न सकिन्छ
c) घुमाउरो झुकावको लागि समर्थन
घ) पूर्ण रूपमा विद्युतीय सर्वो नियन्त्रण
e) झुकाउने क्षतिपूर्तिको लागि समर्थन
f) दुई-आयामी प्रोग्रामिङको लागि समर्थन
2D प्रोग्रामिङ प्रकार्य, 2D DXF रेखाचित्र डेटा आयात गर्नुहोस्, स्वचालित रूपमा झुकाउने प्रक्रिया, झुकाउने आकार, झुकाउने कोण, घुमाउने कोण र अन्य डेटा उत्पन्न गर्नुहोस्।पुष्टिकरण पछि, स्वचालित झुकाउने प्रशोधन गर्न सकिन्छ
मुख्य भाग को सूची
| छैन। | नाम | ब्रान्ड |
| 1 | फ्रेम | बुद्धि |
| 2 | उपकरण | बुद्धि |
| 3 | झुकाउने एकाइ | बुद्धि |
| 4 | सीएनसी प्रणाली | बुद्धि |
| 5 | सर्वो मोटर | बुद्धि |
| 6 | सर्वो चालक | बुद्धि |
| 7 | रेल | बुद्धि |
| 8 | बलस्क्रू | बुद्धि |
| 9 | घटाउने | ताइवान |
| 10 | ब्रेकर | स्नाइडर |
| 11 | टांक | स्नाइडर |
| 12 | विद्युतीय भाग | स्नाइडर |
| 13 | केबल | यिकु |
| 14 | निकटता स्विच | ओमरोन |
| 15 | असर | SKF/NSK/NAICH |
4) मेसिन उपकरणको डिजाइन, निर्माण, निरीक्षण र स्थापनाले निम्न मापदण्डहरू पूरा गर्दछ।
1, GB17120-1997
2, Q/321088JWB19-2012
3,GB14349-2011
स्पेयर पार्ट र उपकरण सूची
| छैन। | नाम | Qt. | टिप्पणी |
| 1 | उपकरण बक्स | 1 | |
| 2 | प्याड स्थापना गर्नुहोस् | 8 | |
| 3 | Inner हेक्सागन स्प्यानर | १ सेट | |
| 4 | म्यानुअल इन्धन भर्ने बन्दुक | 1 | |
| 5 | सीएनसी प्रणाली म्यानुअल | 1 | |
| 6 | खुला स्प्यानर | 1 |





